
ALPIBot
A collaborative robotics project between ITBA and ALPI Rehabilitation Clinic (Buenos Aires) to build an autonomous mobile platform that carries an oxygen tank alongside patients undergoing pulmonary rehabilitation.
Project Overview
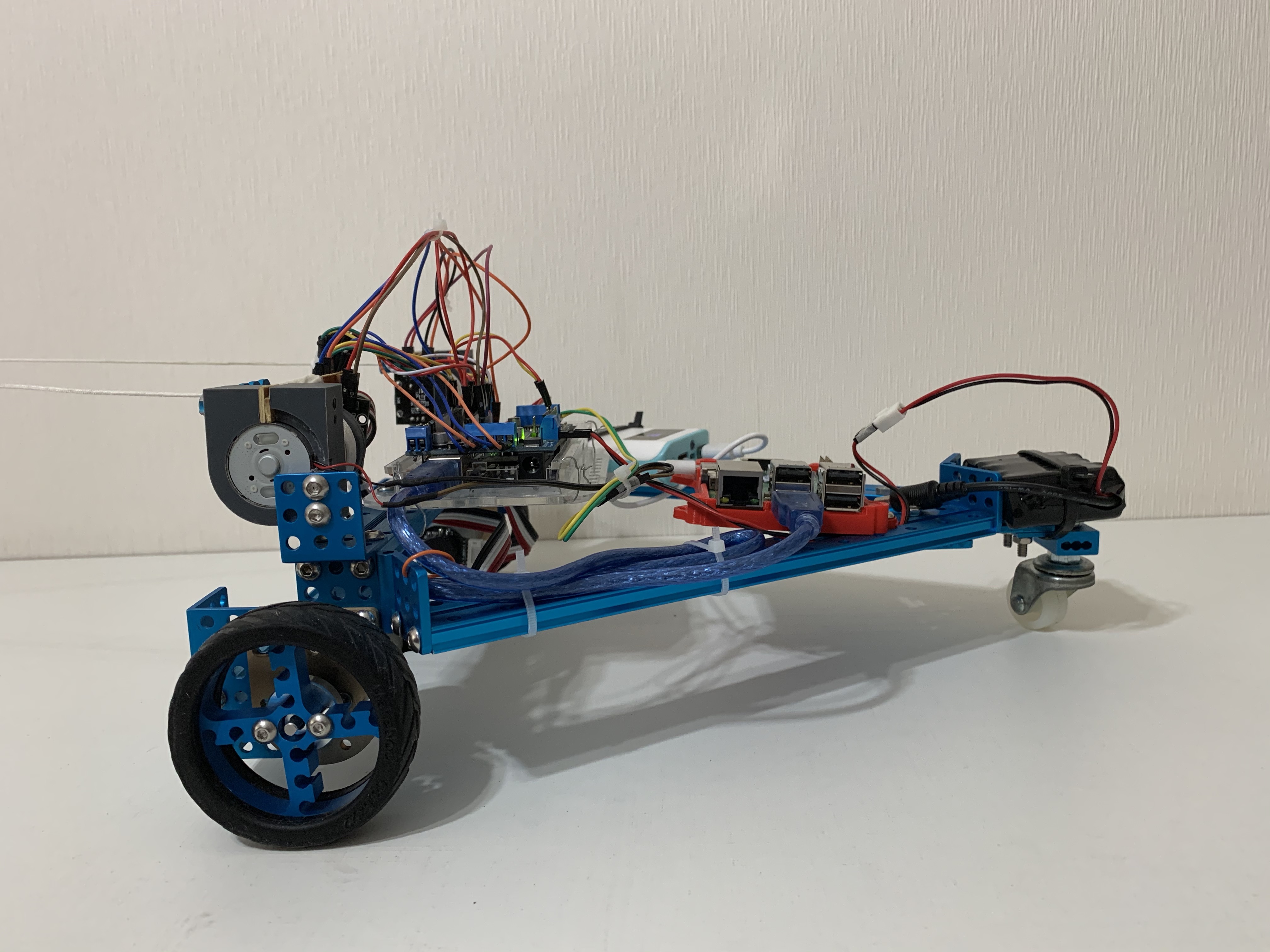
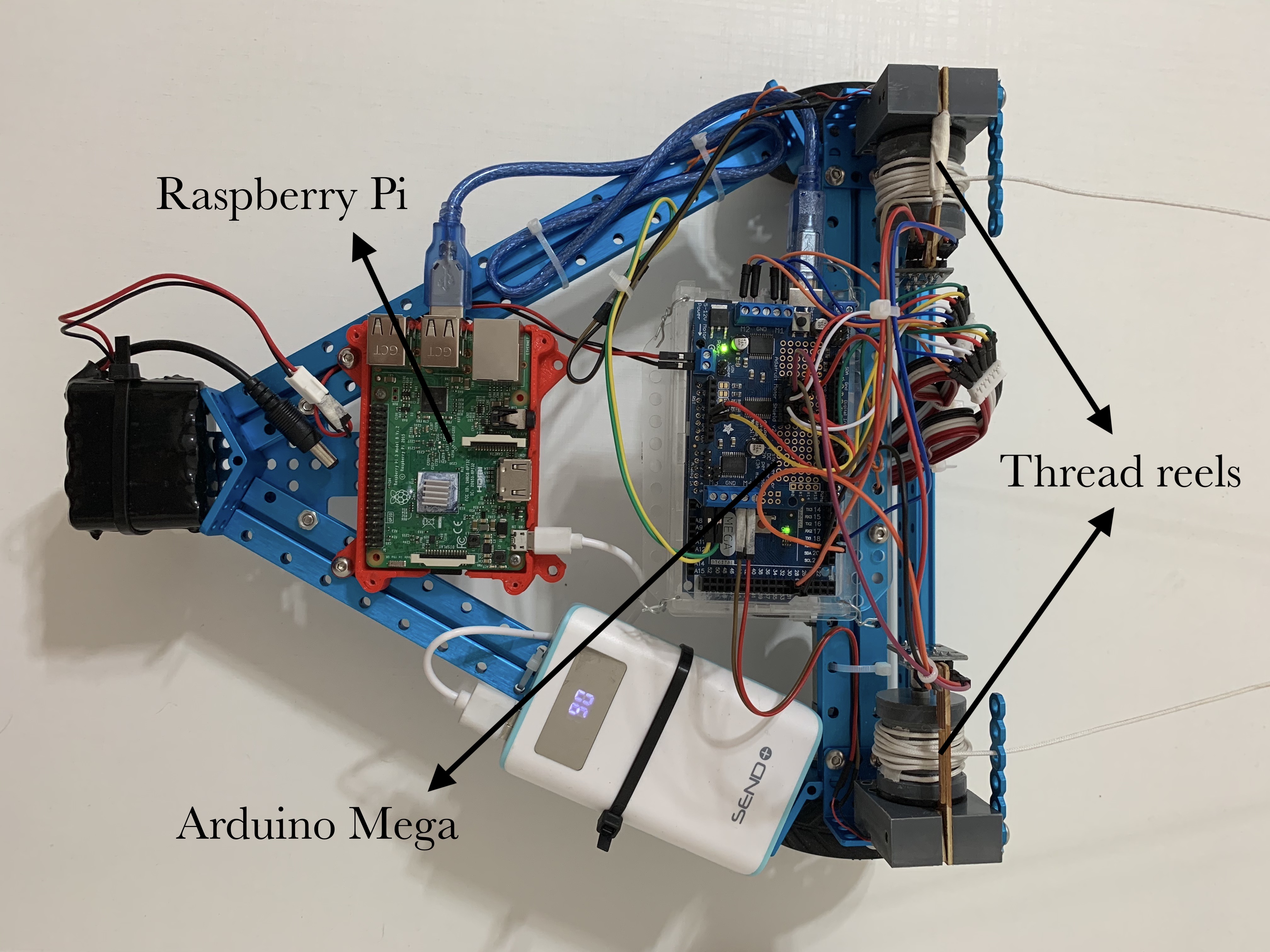
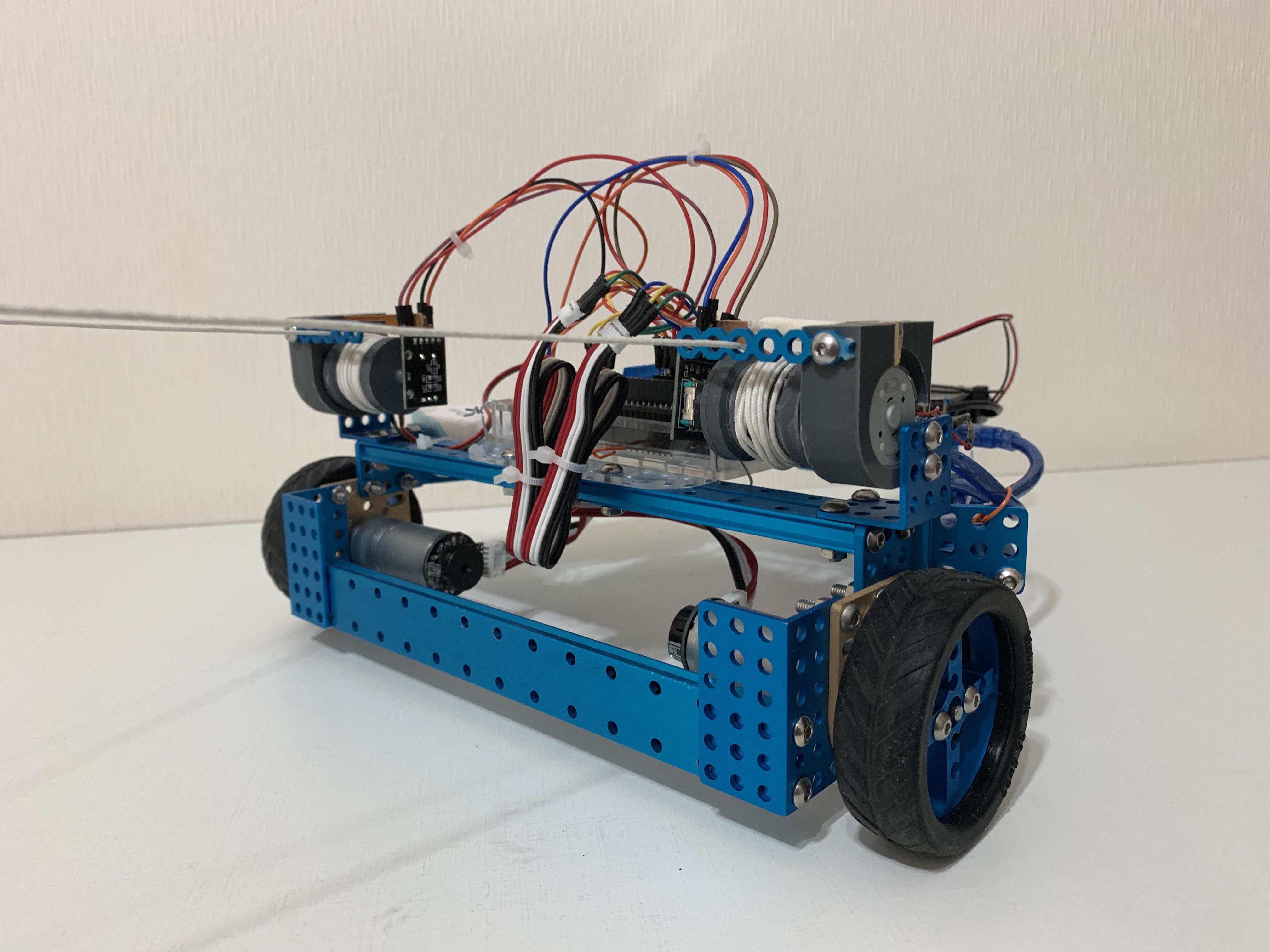
ALPIBot is a mobile robotic platform designed to assist COPD patients during Pulmonary Rehabilitation protocols at the ALPI clinic in Buenos Aires, Argentina. The robot follows the patient by means of a pair of tethers and continuously adjusts its velocity based on the differential length between them — no cameras, no complex perception, just reliable mechanical feedback.
| Field | Medical Robotics / Assistive Technology |
| Partner | ALPI Rehabilitation Clinic, Buenos Aires |
| Status | Active — obstacle avoidance under development |
| Publication | IEEE Transactions on Medical Robotics and Automation |
Scope
The project targets patients with Chronic Obstructive Pulmonary Disease (COPD) who must carry oxygen tanks during rehabilitation exercises. The robot autonomously follows the patient, freeing both hands and reducing physical burden, while staying safe and predictable in a clinical environment shared with other patients and caregivers.
Current work focuses on obstacle avoidance — enabling the robot to navigate around other people in the rehabilitation gym without interrupting the therapy session.
Technologies: ROS, C++, Python, Arduino, embedded motor control, tether-based sensing
Milestones
- Project inception — ITBA + ALPI clinical collaboration established; requirements gathered from physiotherapists and pulmonologists.
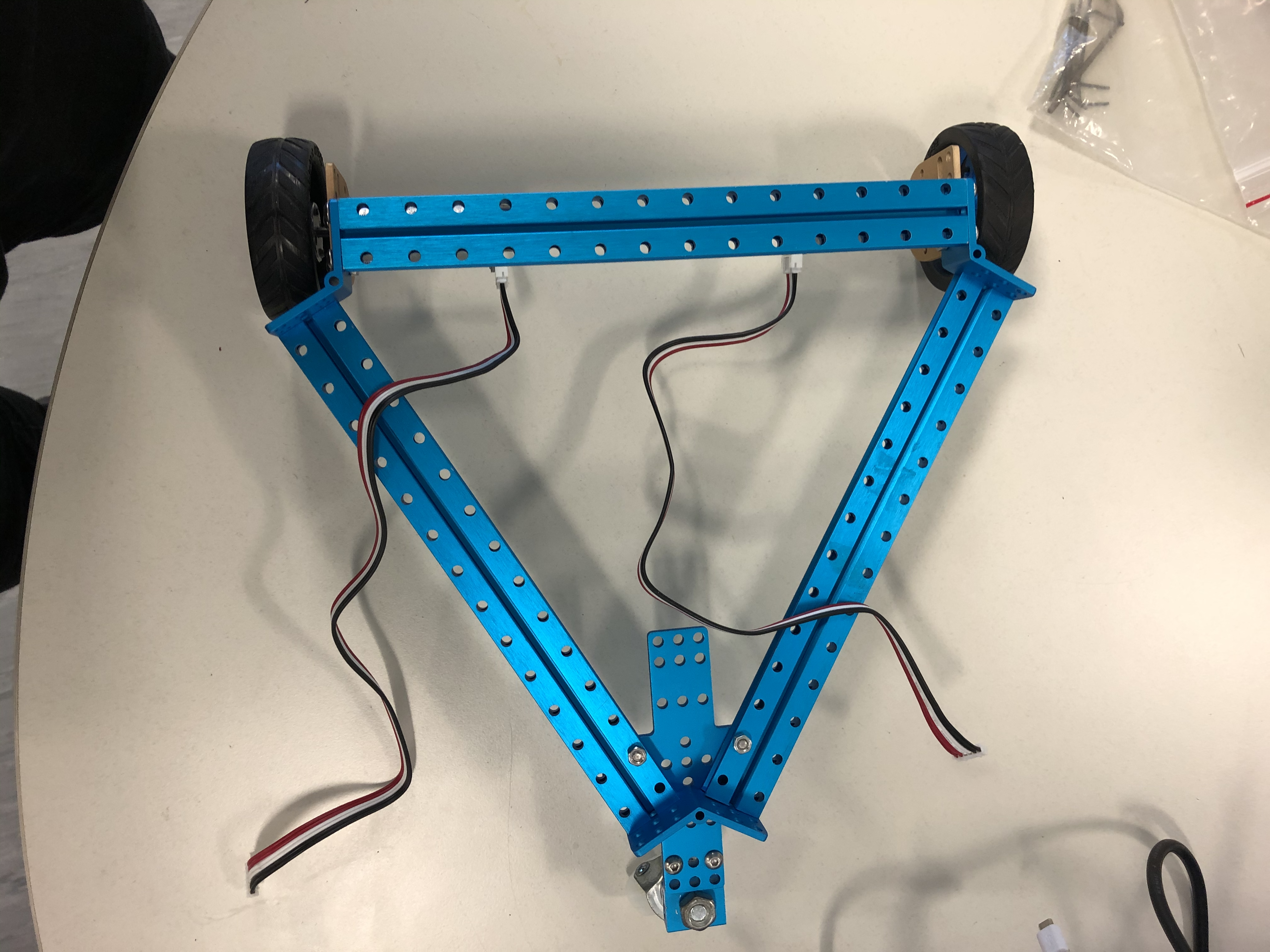
- First prototype — Mechanical design, motor selection, and chassis fabrication completed and validated at the ALPI gym.
- Tether control algorithm — Velocity regulation via differential tether length implemented and tuned in real rehabilitation sessions.
- IEEE Publication (2020) — Results published in IEEE Transactions on Medical Robotics and Automation.
- MIT MISTI involvement — International student collaboration through the MIT MISTI program.
- Media outreach (2021) — Covered by TN, Vorterix, Crónica, ITBA institutional channels, and Facebook.
- Obstacle avoidance (ongoing) — Integration of proximity sensing and reactive navigation for multi-person environments.
- New theses (2024–2025) — Two new academic theses produced, one undergraduate (BS) and one graduate (MS, ITBA–KIT joint program).
Contributions
- End-to-end robot design and construction (mechanical, electronic, firmware)
- Tether-differential control law for smooth patient-following behavior
- Real-world clinical validation at ALPI rehabilitation sessions
- Peer-reviewed publication in a top-tier medical robotics journal
- Mentoring of undergraduate and graduate student researchers
- International academic collaboration (MIT MISTI, KIT Karlsruhe)
Media & Outreach
| Outlet | Link |
|---|---|
| TN (Todo Noticias) | Crearon un robot para ayudar a los pacientes en rehabilitación pulmonar |
| Vorterix Radio | Video interview |
| MIT MISTI | Student story — Daniel Lobelo |
| ITBA Institutional | Un robot que ayuda a respirar |
| Crónica | Crean un robot que ayuda a respirar a pacientes recuperados de Covid-19 |
| Noticias de | Diseñan un vehículo autónomo para auxiliar a personas en su rehabilitación pulmonar |
| Facebook / ITBA | Ideas en Marcha — ALPIBot |
Gallery
Publications & Theses
Journal article
Theses
- BS Thesis - Controller Design Undergrad Project
- BS Thesis — ALPIBot Undergraduate Project
- MS Thesis — Marius Carrier (ITBA–KIT Joint Program)
Code
Updates log
- 2025 — Two new academic theses completed: one BS thesis and one MS thesis through the ITBA–KIT joint program (Marius Carrier).
- 2021 — Broad media coverage in Argentine national press and radio; MIT MISTI international student collaboration.
- 2020 — IEEE Transactions on Medical Robotics and Automation publication accepted.